I am a developer who values dedication and persistence, focusing deeply on one area to achieve mastery. Although my pace may be slow, I strive to warm those around me, much like the steady and comforting glow of a fireplace. I channel my passion for expertise into creating a positive impact on others. I actively participate in various tech community activities to embody this philosophy, and I continue to do so.
While I enjoy learning and mastering new technologies, I firmly believe that focusing on products, customers, and market needs is even more critical. Understanding market demands and creating products that meet customer expectations are, in my view, far more important than simply acquiring the latest technologies.
 Career
Career
Mar. 2022 -
present
Aug. 2019 -
Feb. 2022
Education
Mar. 2015 -
Aug. 2019
GIST (Gwangju Institute of Science and Technology)
Ph.D. degree in School of Electronic Engineering and Computer Science
Mar. 2013 -
Feb. 2015
GIST (Gwangju Institute of Science and Technology)
M.S. degree in School of Electronic Engineering and Computer Science
Mar. 2006 -
Feb. 2013
KIT (Kumoh National Institute of Technology)
B.S. degree in Computer Engineering
(Including two years of the millitary service)
Research Interest
•
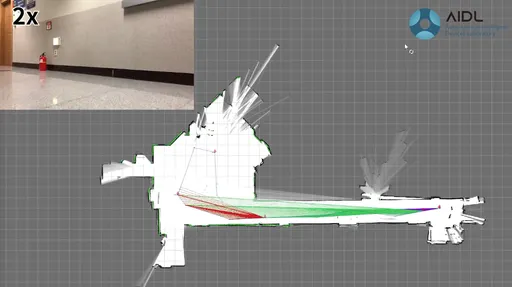
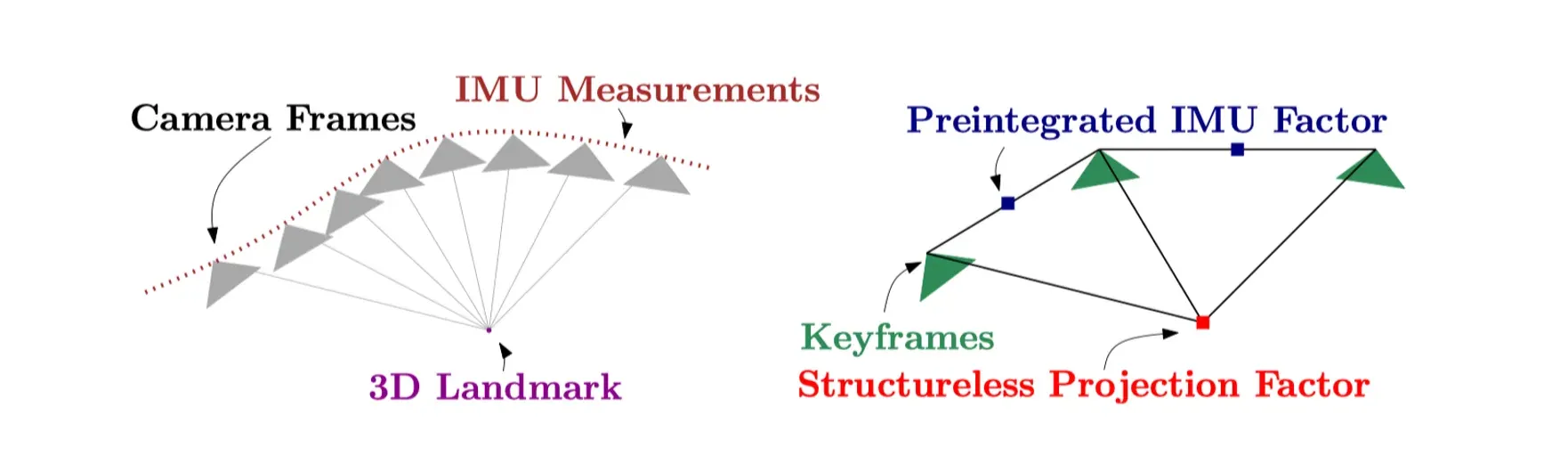
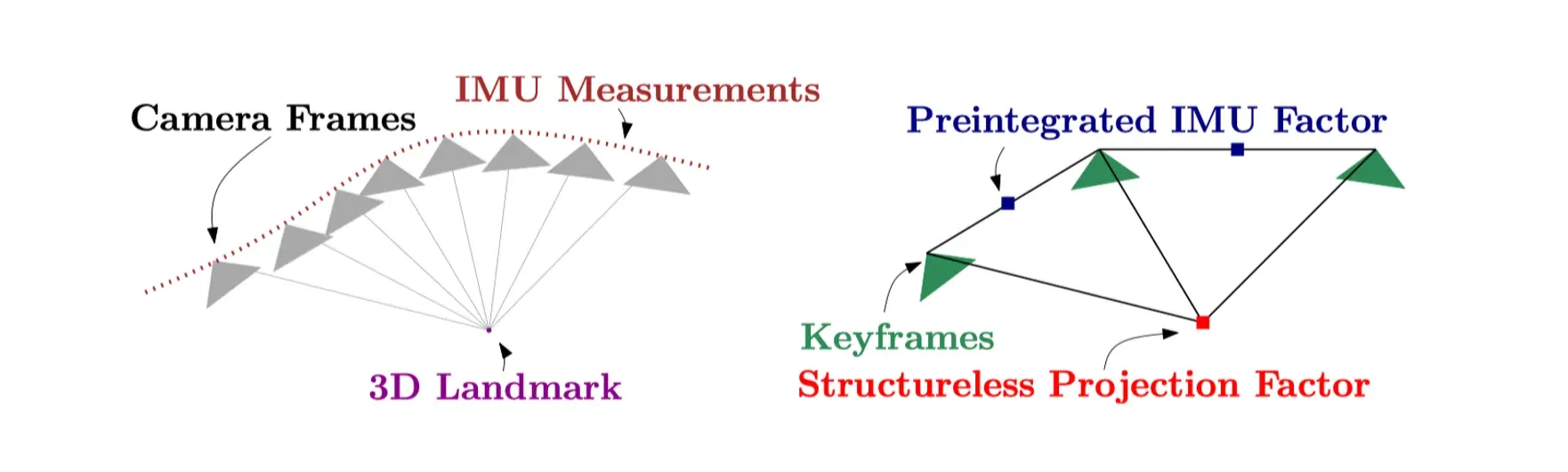
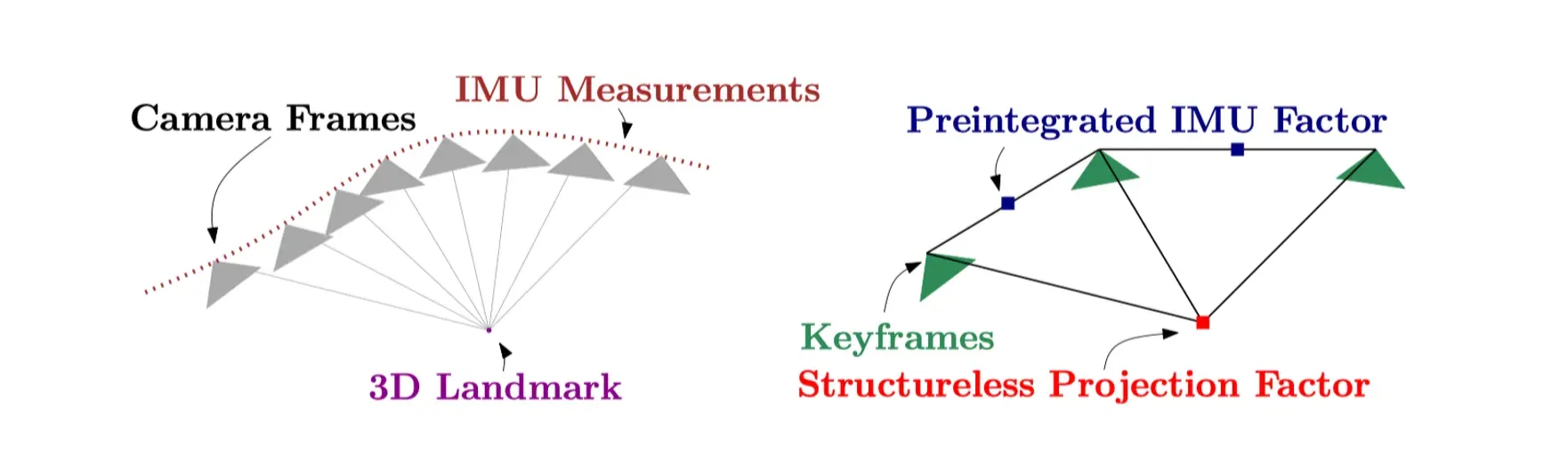
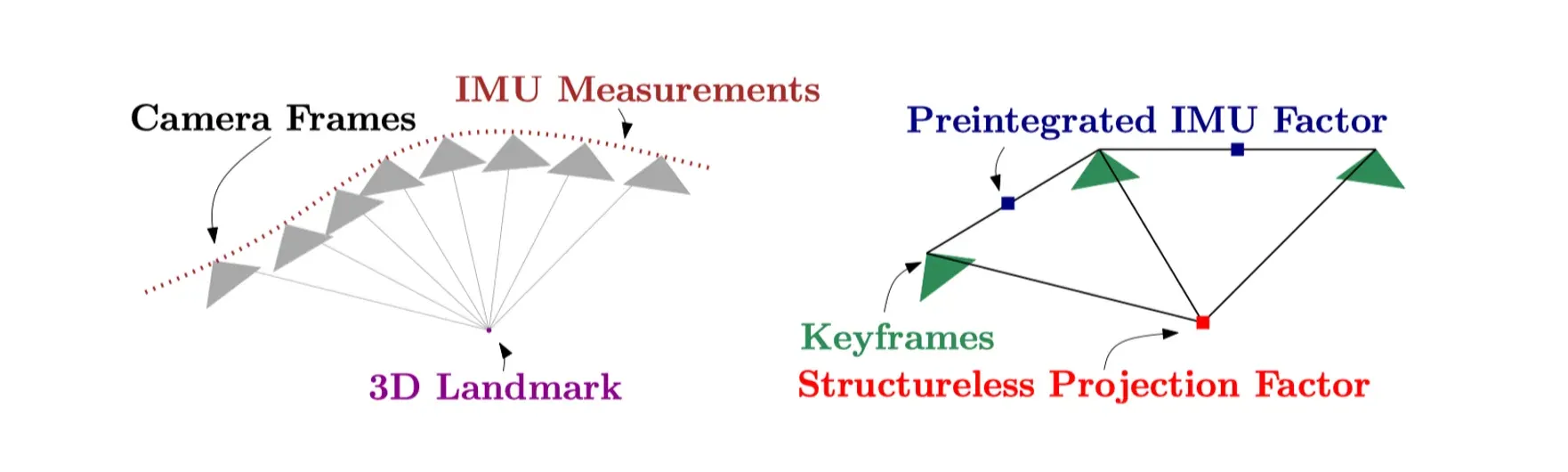
Simultaneous Localization and Mapping
•
Multi View Geometry
•
Visual Localization
•
Computer Vision and Image Processing
•
Machine Learning and Deep Learning
•
Autonomous Driving System
•
Mobile Robotics

Technical Skills & Experience
•
Programming language: C/C++, Python
•
Robotics: ROS
•
Image processing: OpenCV
•
3D geometry: Point cloud library, Open3D
•
Machine learning: Numpy, Scipy, Scikit-learn
•
Deep learning: Tensorflow, Pytorch, Keras
•
Development: Github, Docker, CMake
•
Nonlinear optimization: Ceres, g2o, symforce



.png&blockId=245cc7c3-f3fb-80a5-b36a-e92fb05407bb&width=512)