
Purpose of the project
•
Inspired by the concept of MLOps, design the concept of SLAMOps to a level where the entire process of SLAM can be modularized/automated and applied to real services.
•
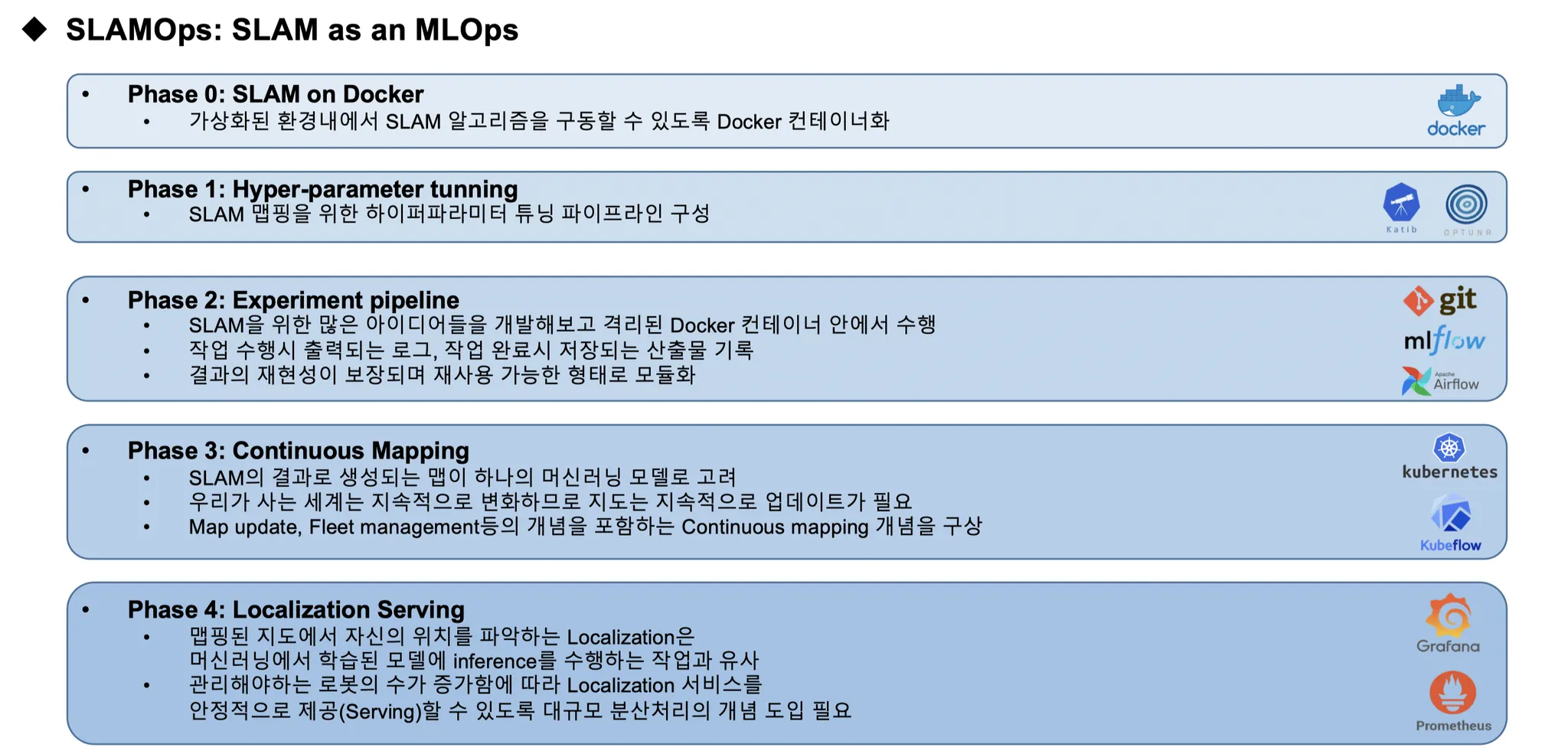
Phase 0: SLAM on Docker
◦
Docker containerization to run SLAM algorithm in virtualized environment
•
Phase 1: Hyper-parameter tuning
◦
Configure SLAM mapping hyper-parameter tuning pipeline using Katib in Kubeflow
•
Phase 2: Experiment Pipeline
◦
Develop many ideas for SLAM and run them in isolated Docker containers
◦
Logs output as tasks are executed, outputs saved when tasks are completed, and
◦
Modularized to ensure results are reproducible and reusable
•
Phase 3: Continuous Mapping
◦
Consider the maps generated as a result of SLAM as one deep learning model
◦
The world we live in is constantly changing, so maps need to be constantly updated.
◦
We envision a concept of continuous mapping that includes concepts such as map update, fleet management, etc.
•
Phase 4: Localization Serving
◦
Localization, which identifies one's location on a mapped map, is similar to the task of performing inference on a model trained in deep learning.
◦
As the number of robots to be managed increases, it is necessary to introduce the concept of large-scale distributed processing to stably provide localization services.
Contributions
•
Studying MLOps
◦
◦
◦
•
Initial conceptual design of SLAMOps
•
Phase 0: SLAM on Docker Content Creation
•
Phase 1: Hyper-parameter tuning
◦
Implementing metrics to evaluate the quality of the maps resulting from SLAM
▪
Reference paper: https://arxiv.org/abs/2101.10402