
Purpose of the project
•
Short-term development of SLAM algorithm for demonstration by external company developing UGVs
•
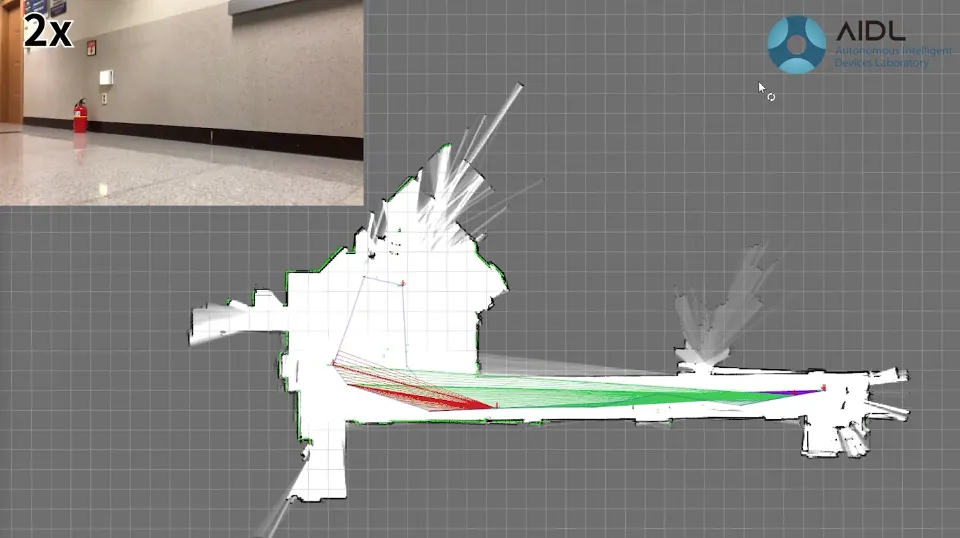
Creating a two-dimensional driving map of an indoor space using a two-dimensional lidar sensor
Contribution
•
Performed indoor driving mapping using 2D lidar SLAM algorithm
◦
Performed 2D SLAM using Google Cartographer
◦
Optimization of SLAM mapping using SOSLAB GL3 lidar