Parking slot mapping demo
•
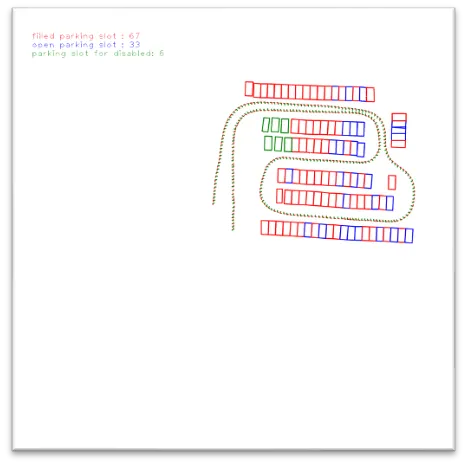
(0:00~0:13) Generate a global parking slot map by fusing the vehicle location information calculated from the Visual SLAM algorithmand the parking slot information calculated from the Parking slot detection algorithm.
•
(0:13~0:25) Visualize the generated parking slot map by comparing it with the actual parking slot map available on satellite maps
•
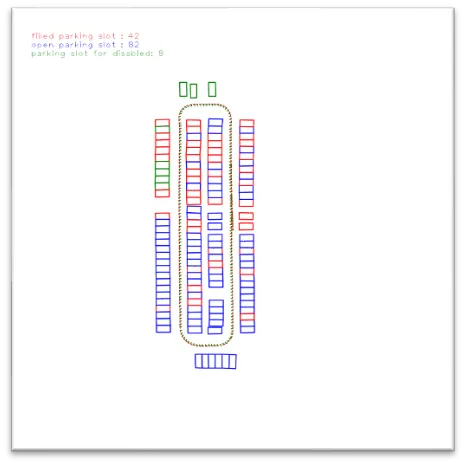
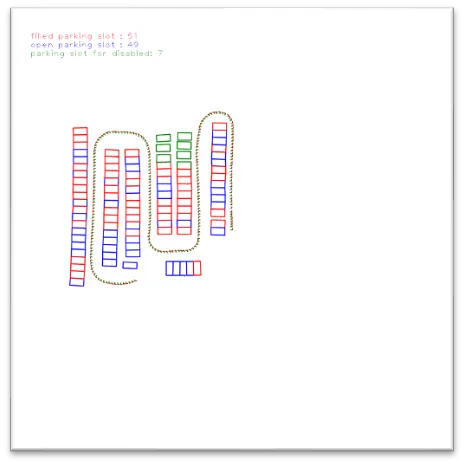
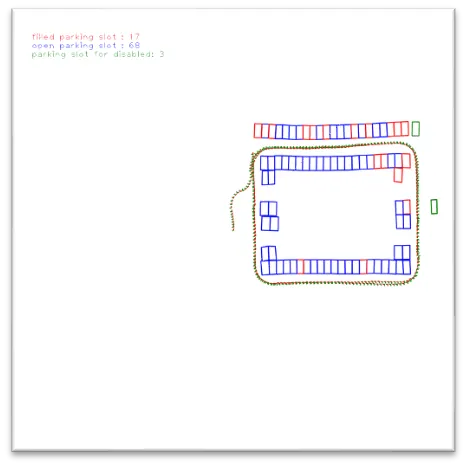
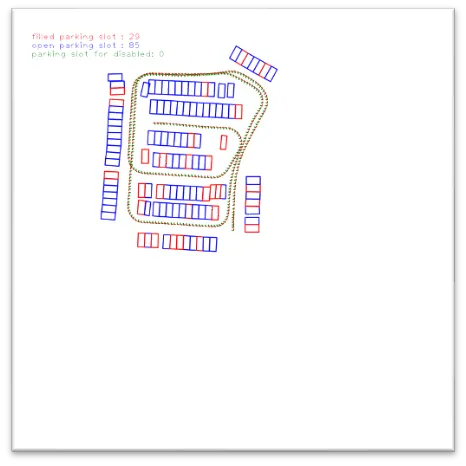
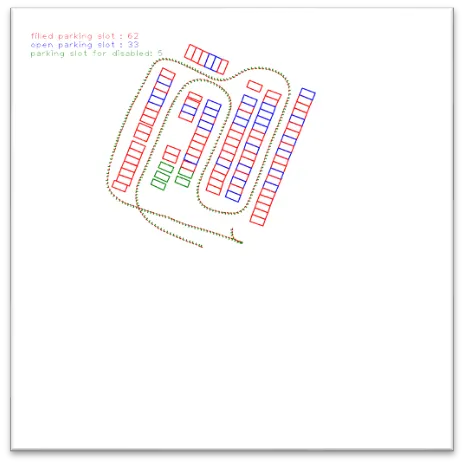
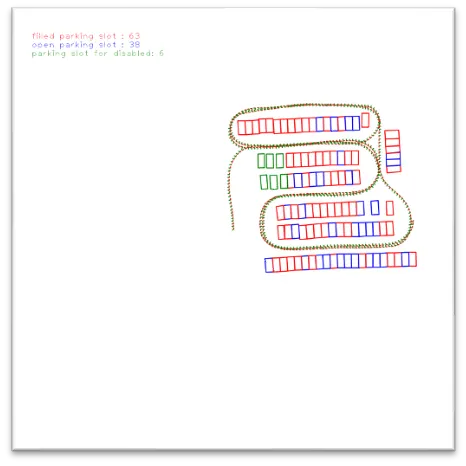
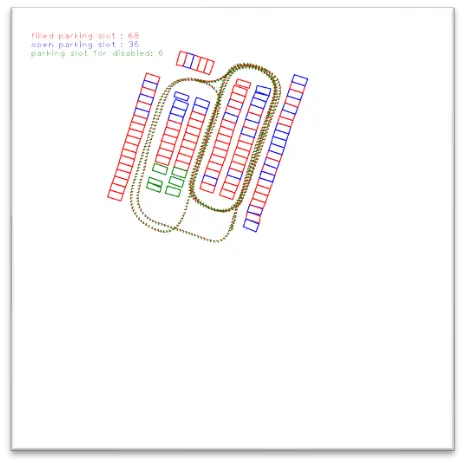
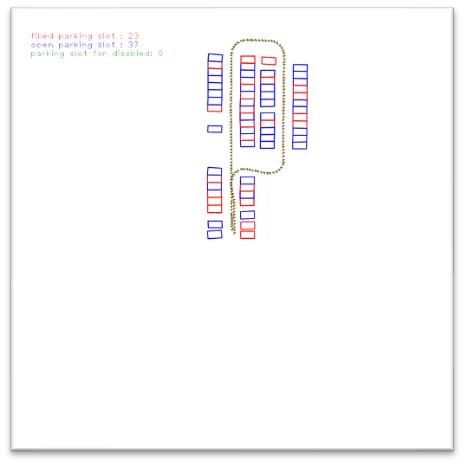
(0:25~1:33) 3D visualization of parking slot mapping
Purpose of the project
•
Create a global parking lot map using semantic information
•
Perform robust positioning and mapping in environments with frequent environmental changes such as supermarket, airport, and department store parking lots
What we contributed
•
Developed the overall algorithm for parking slot mapping
•
Defined and implemented factor formulas for nonlinear optimization
•
Developed parking slot map loop closure detection algorithm utilizing semantic information
•
Developed algorithm for parking slot map pose graph optimization
•
Define and implement a map metric formula to measure the quality of optimized maps