Project objective
•
To develop a handheld SLAM mapping device using a three-dimensional fixed solid-state LiDAR sensor being developed by the company.
•
To select or design suitable modules from hardware to software.
•
To create a foothold for future sales to potential buyers who need 3D fixed LiDAR and SLAM application software.
Contributions
•
Researched and experimented with open-source SLAM software that suited the characteristics of the company's 3D fixed lidar sensors.
•
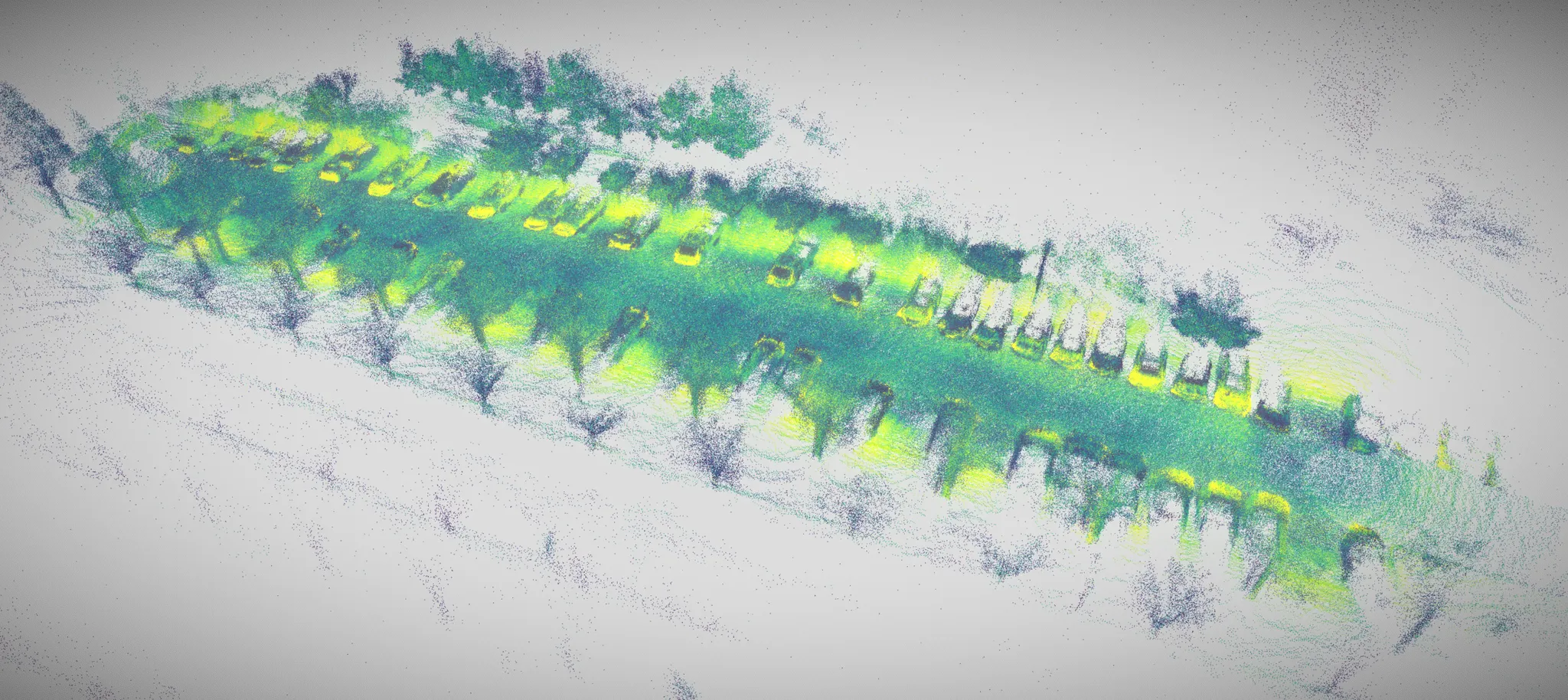
Tuned SLAM software hyper-parameters to achieve high quality mapping results
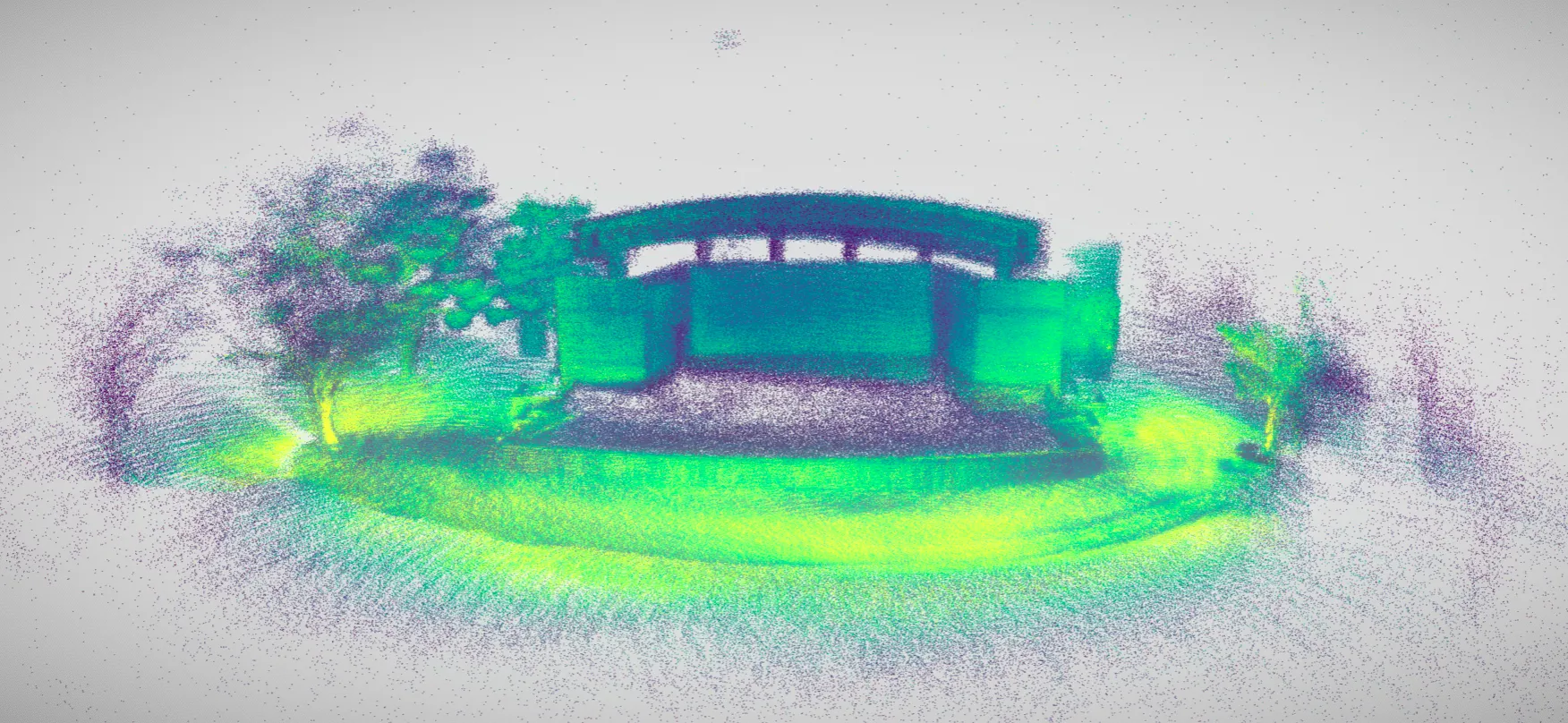
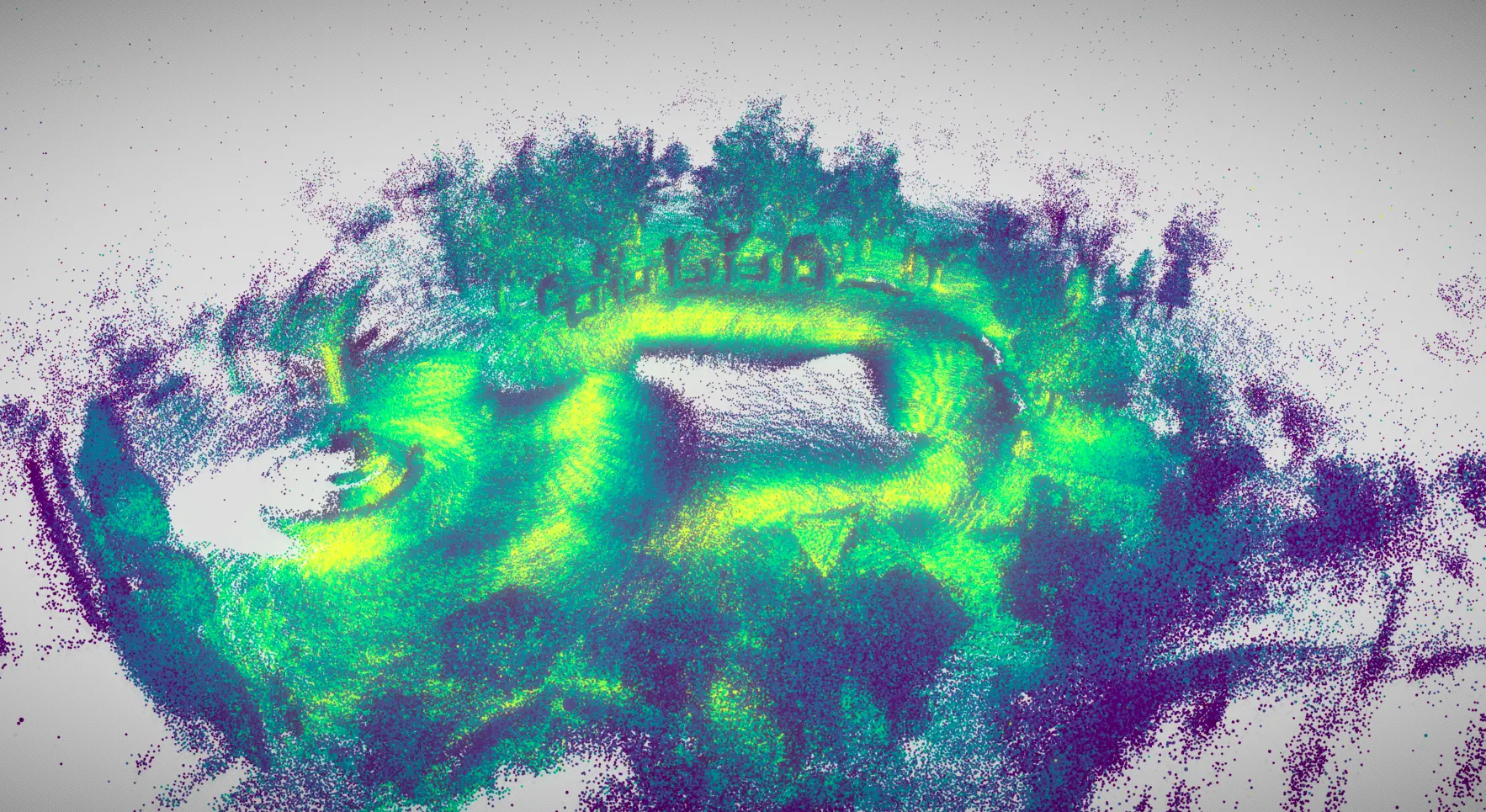
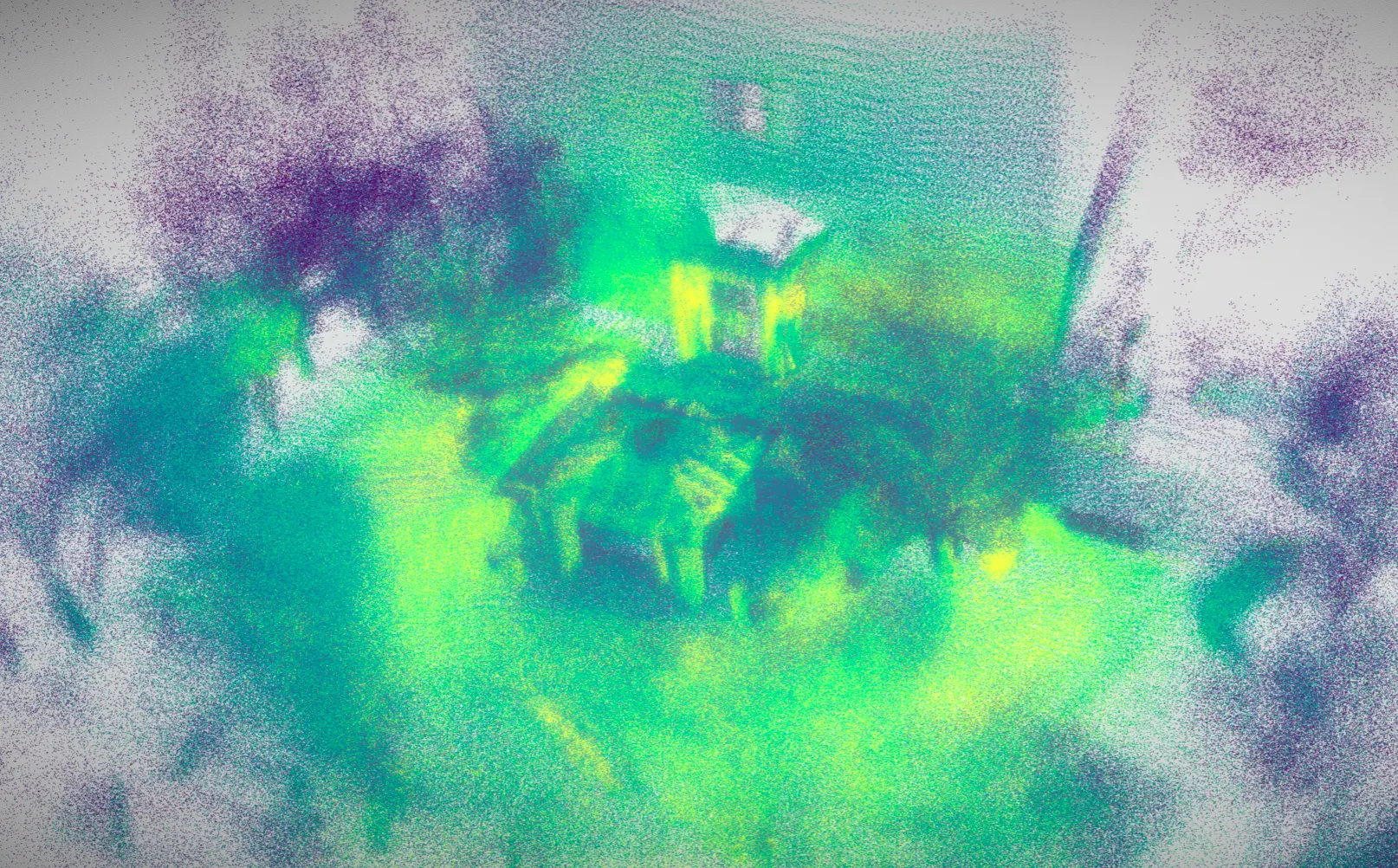
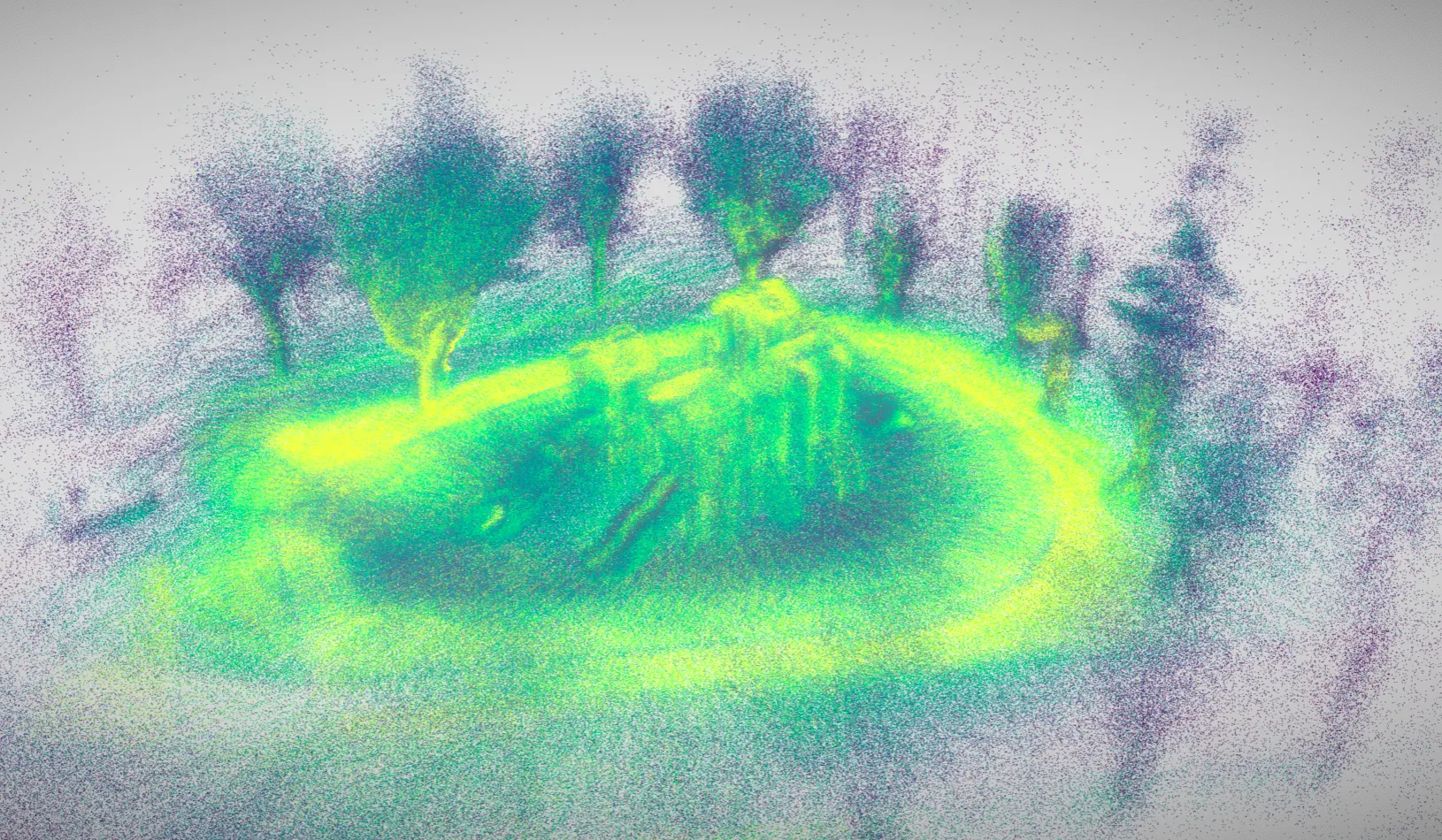
•
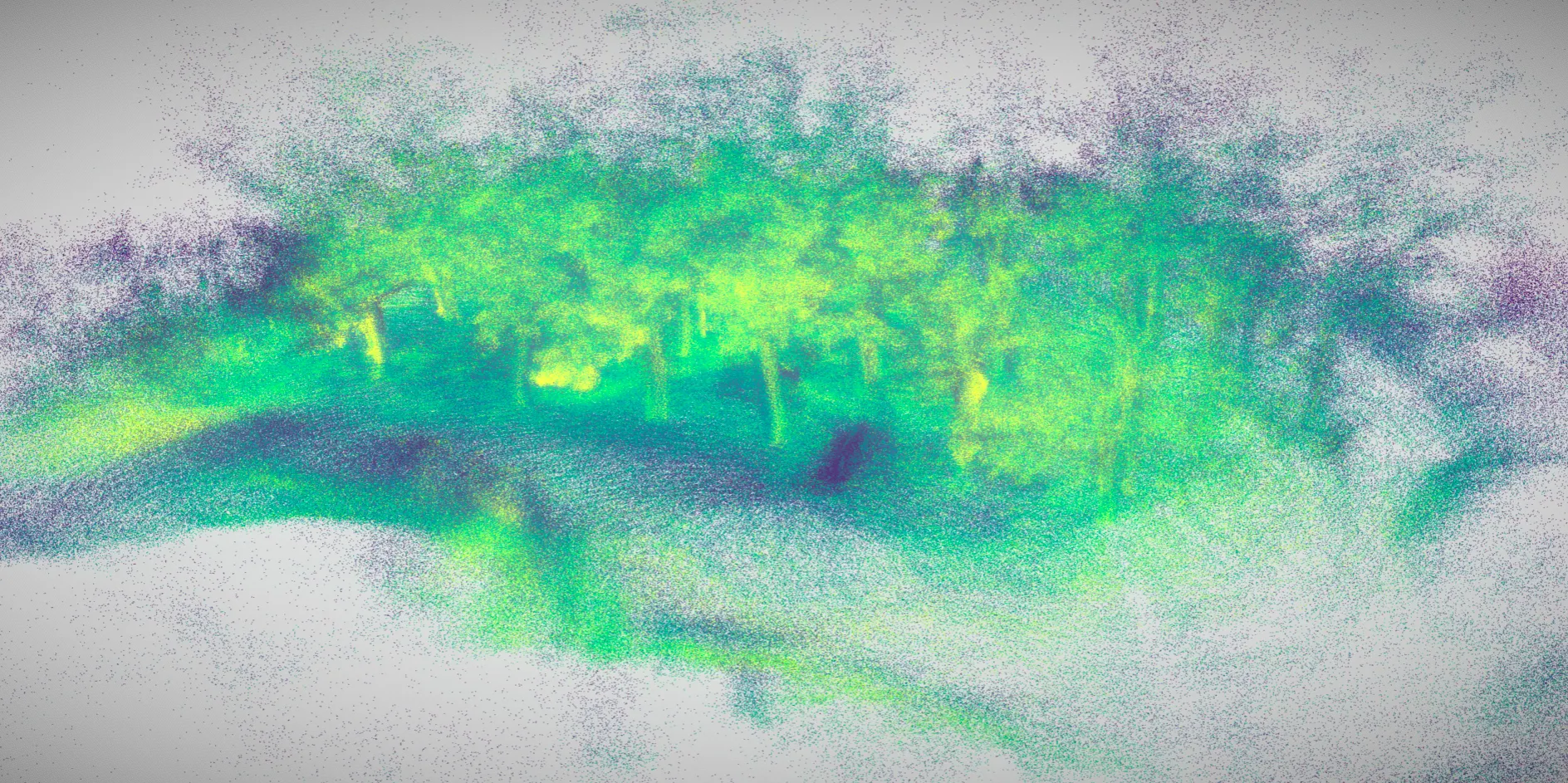
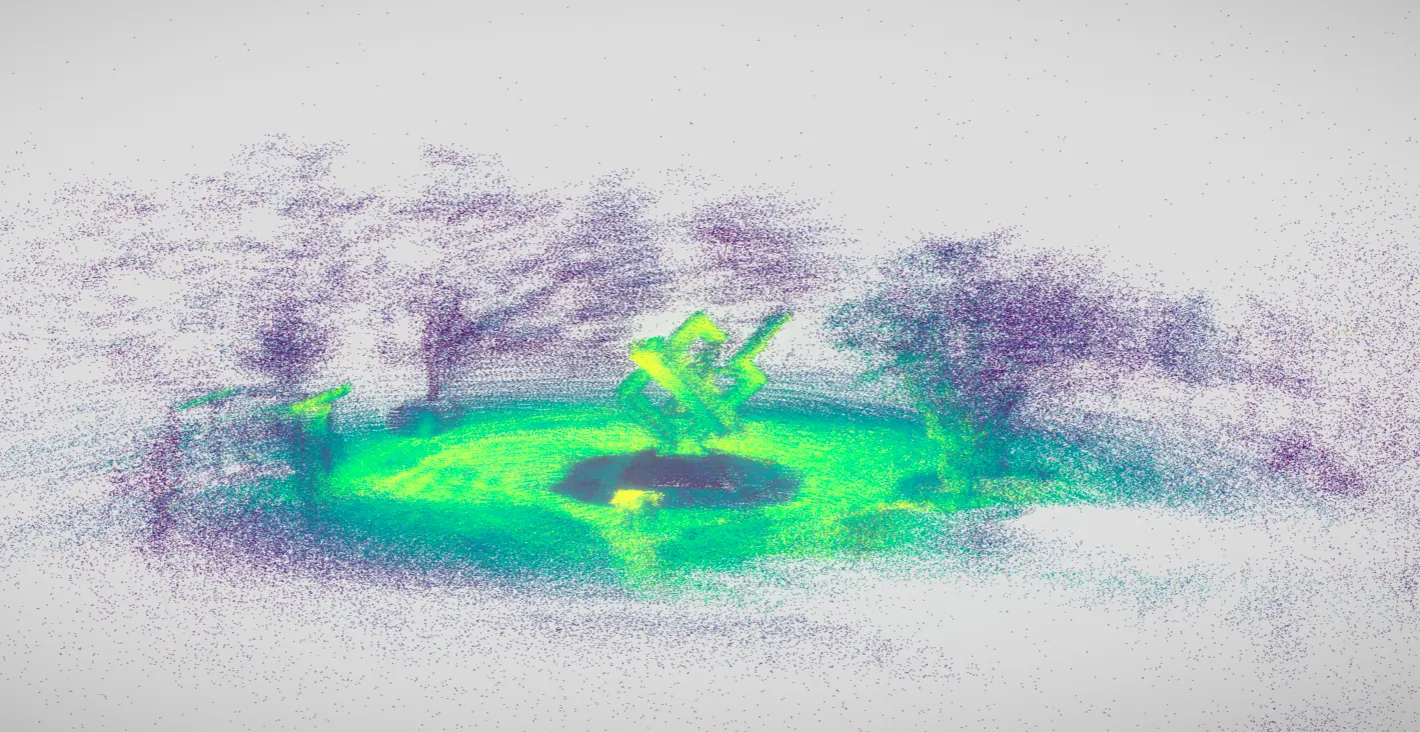
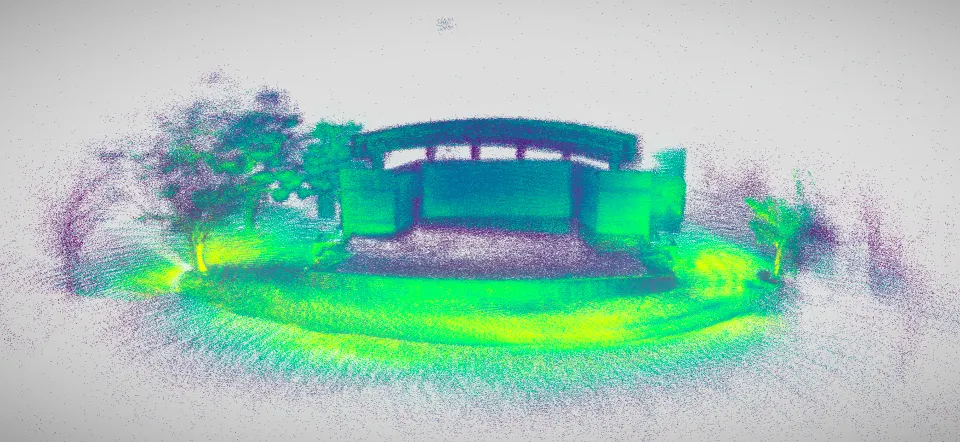
Implemented a module to visualize lidar reflectance values on the generated maps
•
Developed a simple three-dimensional point cloud viewer using Flask on an embedded board
•
Managed development environment and experimentation using Docker
•
Create a user manual and demo video