
Project Objective
•
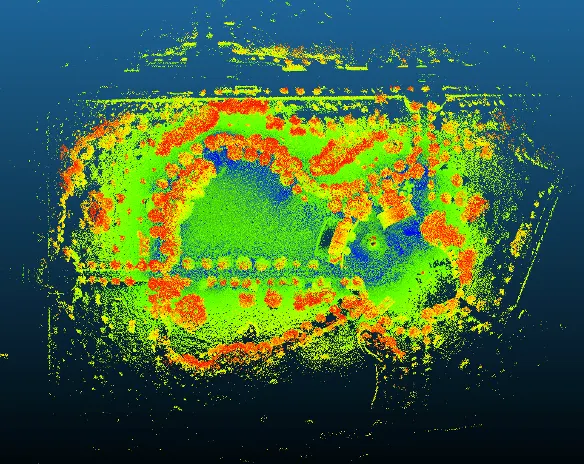
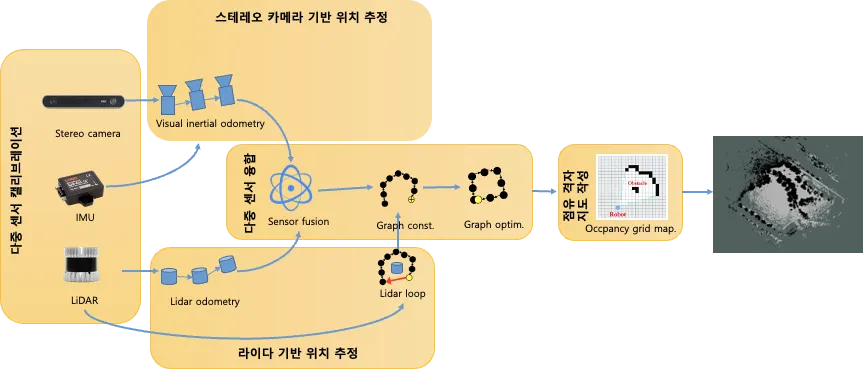
Develop real-time position estimation and 3D map generation algorithm for unmanned vehicles traveling in the wilderness environment based on lidar, camera, and IMU sensor fusion data
•
Develop an algorithm that generates location information along with object recognition and classification information by learning from existing datasets in various environments.
•
Developed algorithms to convert camera-based recognition/classification information into 3D location information based on calibration information of camera and lidar sensors
•
Verified performance through interworking with previously developed unmanned vehicles
Contributions
•
Investigated, compared, selected, analyzed, and implemented lidar-based location estimation algorithm
•
Investigated, compared, selected, and analyzed camera-based position estimation algorithms
•
Implemented multi-sensor fusion module
◦
Factor graph-based sensor fusion → To improve the quality of mapping results
◦
Kalman filter-based sensor fusion → To improve the speed of Localization results
•
Implement obstacle occupancy grid mapping module
•
Analyzed the results and created a user manual